Noticias de la compañía
Cómo controlar la velocidad y el par de la máquina de prueba universal electrónica
Tiempo de lanzamiento:2018-11-23 fuente:Jinan Hengsi Shanda Instrument Co., Ltd. Navegar:
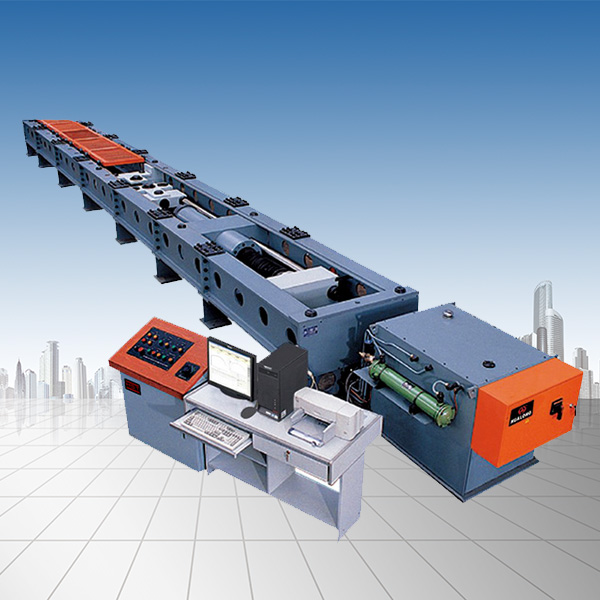
Máquina de prueba universal electrónicaEl control de velocidad y el control de par de las máquinas de prueba universales electrónicas se controlan por cantidad analógica. El control de posición de la máquina de prueba universal electrónica está controlado por la generación de pulsos. Qué método de control específico debe elegirse de acuerdo con los requisitos del cliente y qué tipo de funciones de movimiento se deben cumplir.
Si no tiene requisitos para la velocidad y la posición del probador universal electrónico del motor, simplemente genere un par constante de evaluador universal de electrones, por supuesto, use el modo de torque de probador universal electrónico.
Si existen ciertos requisitos de precisión para la posición del Probador Universal Electrónico y la Velocidad del Probador Universal Electrónico, pero no están muy preocupados por el torque del Probador Universal Electrónico en tiempo real, no es conveniente utilizar el modo de torque Electronic Universal Tester, y es mejor usar la velocidad de testizador universal electrónico o el modo de posición del Tester Universal Electrónico. Si el controlador superior tiene una mejor función de control de circuito cerrado, el efecto de control de velocidad del uso de la máquina de prueba universal electrónica será mejor. Si los requisitos en sí no son muy altos, o básicamente no hay requisitos en tiempo real, el método de control de posición de la máquina de prueba universal electrónica no tiene requisitos muy altos para el controlador superior.
A juzgar por la velocidad de la respuesta del conductor del servo, la cantidad de cálculo del modo de par de la máquina de prueba universal electrónica es pequeña, y el controlador responde a la señal de control rápidamente; La cantidad de cálculo del modo de posición de la máquina de prueba universal electrónica es lenta para responder a la señal de control.
Cuando hay requisitos relativamente altos para el rendimiento dinámico en movimiento, el motor debe ajustarse en tiempo real. Entonces, si el controlador en sí tiene una velocidad lenta en la calculación de la máquina de prueba universal electrónica (como PLC, o controlador de movimiento de gama baja), se utiliza el control electrónico de posición de la máquina de prueba universal. Si el controlador calcula la máquina de prueba universal electrónica a una velocidad más rápida, puede usar el método electrónico de velocidad de la máquina de prueba universal para mover el anillo de posición de la máquina de prueba universal electrónica del controlador al controlador para reducir la carga de trabajo del controlador y mejorar la eficiencia (como la mayoría de los controladores de movimiento de gama media a alta); Si hay un mejor controlador superior, también puede usar el método de torque de la máquina de prueba universal electrónica para mover el anillo de velocidad de la máquina de prueba universal electrónica del conductor. Esto generalmente es solo un controlador dedicado de alta gama para hacer esto, y no hay necesidad de usar un servomotor en este momento.
En términos generales, ya sea que el control de la unidad sea bueno o no, cada fabricante dice que lo hace él mismo, pero ahora hay un método de comparación más intuitivo llamado ancho de banda de respuesta. Cuando el control de torque del probador universal electrónico o el control de velocidad del probador universal electrónico se usa para darle una señal de onda cuadrada a través del generador de pulso, lo que hace que el motor gire continuamente y revertiera continuamente, y aumente continuamente la frecuencia. El osciloscopio muestra una señal de barrido. Cuando el vértice del sobre alcanza el 70.7% del valor, significa que el paso se ha perdido. La frecuencia en este momento puede mostrar cuyo producto es excelente. El bucle actual general puede alcanzar más de 1000Hz, mientras que el bucle de velocidad del probador universal electrónico solo puede alcanzar unas pocas docenas de hertz.
Para decirlo de una manera más profesional:
1. Control de par del probador universal electrónico: el método de control de torque del probador universal electrónico es establecer el par del eje del motor en la salida exterior mediante la entrada de la cantidad analógica externa o la asignación de la dirección directa. Específicamente, por ejemplo, si 10V corresponde a 5 nm, la salida del eje del motor es de 2.5 nm Cuando la cantidad analógica externa se establece en 5V: si la carga del eje del motor es inferior a 2.5 nm, el motor gira hacia adelante, el motor no gira cuando la carga externa es igual a 2.5Nm, y el motor se vuelve a ver cuando es mayor que 2.5nm (generalmente generada bajo la carga). El tamaño del par establecido se puede cambiar cambiando instantáneamente la configuración de la cantidad analógica, o se puede cambiar por método de comunicación para cambiar el valor de la dirección correspondiente.
La aplicación se encuentra principalmente en dispositivos de devanado y desenrollamiento que tienen requisitos estrictos sobre la fuerza del material, como dispositivos de radiación de cables o equipos de fibra óptica. La configuración de par de la máquina de prueba universal electrónica debe cambiarse en cualquier momento de acuerdo con el cambio del radio de devanado para garantizar que la fuerza del material no cambie con el cambio del radio de devanado.
2. Control de posición de la máquina de prueba universal electrónica: el modo de control de posición de la máquina de prueba universal electrónica generalmente determina la velocidad de rotación de la máquina de prueba universal electrónica a través de la frecuencia de los pulsos de entrada externos y determina el ángulo de rotación a través del número de pulsos. Algunos servos pueden asignar directamente la velocidad y el desplazamiento de la máquina de prueba universal electrónica a través de la comunicación. Dado que el modo de posición del probador universal electrónico puede controlar estrictamente la velocidad del probador universal electrónico y la posición del probador universal electrónico, generalmente se usa en dispositivos de posicionamiento. Áreas de aplicación como máquinas herramientas CNC, maquinaria de impresión, etc.
3. Modo de velocidad de la máquina de prueba universal electrónica: la velocidad de la máquina de prueba universal electrónica giratoria se puede controlar mediante la entrada de la cantidad analógica o la frecuencia de los pulsos. El modo de velocidad de la máquina de prueba universal electrónica también se puede colocar cuando se controla el control de PID del anillo exterior con el dispositivo de control superior, pero la señal de posición del motor o la señal de posición de la carga directa de la máquina de prueba universal electrónica se debe administrar a la posición superior para la operación. El modo de posición del probador universal electrónico también admite el anillo exterior de carga directa para detectar la señal de posición del probador universal electrónico. En este momento, el codificador en el extremo del eje del motor solo detecta la velocidad del motor, y el dispositivo de detección proporciona la señal de posición del probador universal electrónico en el extremo directo de la carga. Esta ventaja es que puede reducir los errores durante el proceso de transmisión intermedia y aumentar la precisión de posicionamiento de todo el sistema.
4. Hablemos de 3 anillos. El servo generalmente está controlado por tres anillos. Los llamados tres anillos son tres sistemas de ajuste PID de retroalimentación negativa de circuito cerrado. El anillo PID en el interior es el anillo actual, que se lleva a cabo completamente dentro del Servo Driver. La corriente de salida del controlador a cada fase del motor se detecta a través del dispositivo del salón, y la corriente de retroalimentación negativa se establece para el ajuste PID, de modo que la corriente de salida está lo más cerca posible de la corriente establecida. El anillo actual controla el par de la máquina de prueba universal electrónica del motor, por lo que el cálculo del conductor es pequeño y la respuesta dinámica es rápida en el modo de torque de la máquina de prueba universal electrónica.
El segundo anillo es el anillo de velocidad de la máquina de prueba universal electrónica. El ajuste PID de retroalimentación negativa se realiza a través de la señal detectada del codificador del motor. La salida PID en su anillo es directamente la configuración del anillo actual. Por lo tanto, el anillo de velocidad de la máquina de prueba universal electrónica incluye el anillo de velocidad y el anillo actual. En otras palabras, cualquier modo debe usar el anillo actual. El anillo actual es la base del control. Mientras se controlan la velocidad y la posición de la máquina de prueba universal electrónica, el sistema realmente controla la corriente (par de la máquina de prueba universal electrónica) para lograr el control correspondiente de la velocidad de la máquina de prueba universal electrónica y la posición de la máquina de prueba universal electrónica.
El tercer anillo es el anillo de posición de la máquina de prueba universal electrónica. Es el anillo exterior. Se puede construir entre el controlador y el codificador del motor o entre el controlador externo y el codificador del motor o la carga final. Debe determinarse de acuerdo con la situación real. Dado que la salida interna del anillo de control de posición de la máquina de prueba universal electrónica es la configuración del anillo de velocidad de la máquina de prueba universal electrónica, el sistema realiza los 3 anillos en el modo de control de posición de la máquina de prueba universal electrónica. En este momento, el volumen de cálculo del sistema y la respuesta dinámica de la máquina de prueba universal electrónica también son lentos.
Productos recomendadosPRODUCTS